
华大LDD系列伺服电机配IK总线伺服驱动器在搬运机械手上的应用
一、 系统说明
机械手可在空间抓放物体,动作灵活多样,适用于可变换生产品种的中、小批量自动化生产,广泛应用于柔性自动线。可按预先设定的程序进行工件分拣、搬运等动作。可部分代替人工在高温和危险的作业区进行单调持久的作业,并可根据条件和要求的变化随时更改相关控制参数。由于取工件和堆放工件都有定位精度要求,所以在机械手控制中,除了要对垂直手臂进行控制外,还要涉及到对水平手臂以及机械手腰部回转进行伺服控制。
二、 搬运机械手对伺服的要求
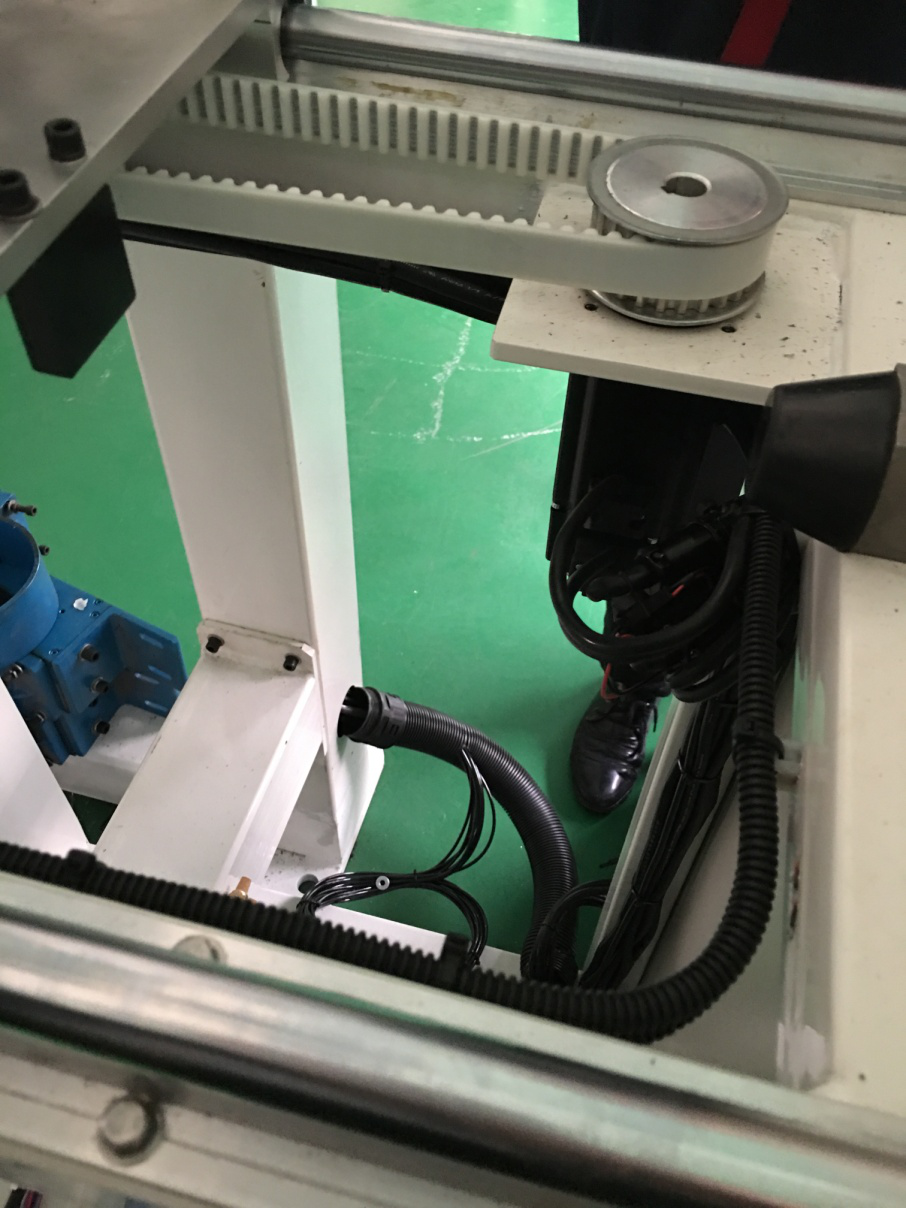
该套系统用五套伺服驱动器和伺服电机构成(机械手传动系统采用皮带传送,刚性相对较小)负责机床的上下料,1,2,3,4轴控制x,y方向的运动,第5轴控制z轴水平托盘的运动,控制方式采用新代M2总线系统搭配iK系列驱动器,iK默认M2通讯方式为安川模式,现场图如下图:


三、 行业匹配性能介绍
上位机与伺服驱动器控制端相连,控制方式是位置模式下脉冲+方向。驱动器及相关运算基板等固定在电柜里面,伺服驱动器接收上位机的脉冲指令从而驱动电机带动机头完成相应的动作。
四、 IK伺服驱动器在搬运机械手上的应用调试
1、伺服驱动器和电机配置
设备名称 | 搬运机械手 | |
驱动及电机配置 | 驱动器型号 | 电机型号 |
1轴 |
ZSD-iKAS202B | 80ST-M04030LM1DD |
2轴 | 80ST-M04030LM1DD | |
3轴 | 80ST-M04030LM1DD | |
4轴 | 80ST-M04030LM1DD | |
5轴 | 60ST-M0133050LM1DD | |
2、相关参数设置
⑴速度环比例增益
此增益值加大时,可提升速度应答性,从而使驱动器尽可能及时且精确按照指令驱动电机,但若设定太大时易产生振动及噪音,因此,应根据实际情况选择合适的值。
⑵位置环增益
增大位置环增益,以加快系统反应。减少定位误差,缩短定位时间。但过大会引起机械震动和系统位置超调。
⑶速度环积分时间常数
此参数减小时,可提升速度应答性及缩小速度控制误差量。但若设定太小时易产生振动及噪音。
欢迎扫一扫、关注公司微信小程序及公众号及时了解更多:


