
华大LB伺服电机与K系列伺服驱动器在六轴机械手上的应用
随着工业生产线自动化程度的提高,并日趋向柔性化发展。工业机械手臂被越来越多的应用在涂漆、包装、焊接、装配等生产环节,来代替人工完成恶劣环境下的劳动。这里以六轴热镀锌机械手为例进行说明。在机械上,六轴机械手臂结构上设计为6自由度空间坐标系。六个轴都采用伺服电机带减速机工作。用卡诺普机器人控制系统控制伺服驱动器完成相应的动作。伺服驱动器工作在位置模式,上位机发送位置指令给伺服驱动器,伺服驱动器驱动电机按照指令完成相应的动作。
一、 六轴机械手对伺服的要求
六轴镀锌机械手主要是由6套伺服驱动器和电机配合减速机构成,完成机械手定位旋转,另外有2套伺服驱动器伺服驱动器和电机负责送料。其中,1、2、3轴是由ZSD-KBS50AB配180ST-M02720电机组成,4、5、6轴是由ZSD-KAS20AB配摩恩的130ST-M10015电机组成。7、8轴是由ZSD-KAS20AB配110ST-M06030电机组成。伺服驱动器都工作在位置模式,机器人控制系统给伺服驱动器发控制信号,驱动伺服电机完成相应动作。现场图如图1:

图1
二、 行业匹配性能介绍
上位机与伺服驱动器控制端相连,控制方式是位置模式下脉冲+方向,上位机发送位置指令给伺服驱动器,伺服驱动器驱动电机按照指令完成相应动作,控制端接线定义如下:
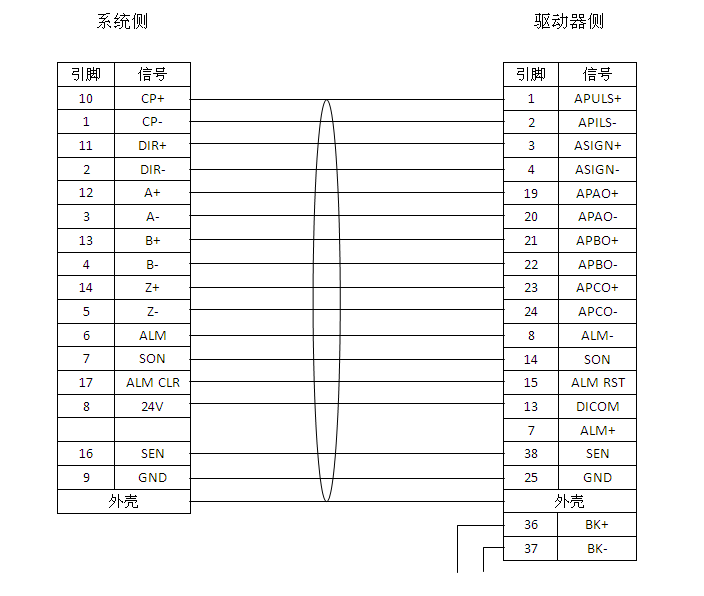
图2
三、 伺服在六轴机械手上的应用
1、伺服驱动器和电机配置
轴位 | 伺服驱动器型号 | 伺服电机型号 |
1轴 | ZSD-KBS50AB | 180ST-M27020 |
2轴 | ZSD-KBS50AB | 180ST-M27020 |
3轴 | ZSD-KBS50AB | 180ST-M27020 |
4轴 | ZSD-KAS20AB | 130ST-M10015 |
5轴 | ZSD-KAS20AB | 130ST-M10015 |
6轴 | ZSD-KAS20AB | 130ST-M10015 |
7轴(送料) | ZSD-KAS20AB | 110ST-M06030 |
8轴(送料) | ZSD-KAS20AB | 110ST-M06030 |
2、相关参数设置
⑴电子齿轮比
按具体应用要求控制分辨率
⑵速度环积分时间常数
此参数减小时,可提升速度应答性及缩小速度控制误差量。但若设定太小时易产生振动及噪音,此参数越大,刚性越差。
⑷速度环比例增益
此增益值加大时,可提升速度应答性。但若设定太大时易产生振动及噪音
⑸位置环增益
增大位置环增益,以加快系统反应。减少定位误差,缩短定位时间。但过大会引起机械震动和系统位置超调。
⑹转动惯量比
负载惯量与电机出轴惯量的比值
欢迎扫一扫、关注公司微信小程序及公众号及时了解更多:


